JRのNINJA400やLEAP-450の様にモータの正逆転で3Dスタントが出来るマルチコプターが出てきました。
マルチコプターの制御特性により同時に全モーターの回転方向を切り替えないとヨー方向の制御が出来ないので、可変ピッチを使った機体に比べてスタント面で多少劣ると考えられますが、初期費用、メンテナンス費用などコストパフォーマンスに優れています。動力的にはコントローラーソフトの変更と、ESCの取替え、場合によってはモーター-の変更で対応できると思われます。
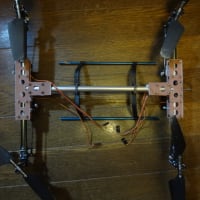
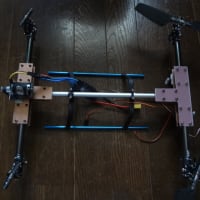
逆転できるアンプを探して、RCカーアンプにたどり着き試してみました。
動画の様に逆転時にもたつく場合があり、時に脱極してしまいます。これでは逆転時に機体の姿勢が乱れてしまいます。
結果をまとめると、
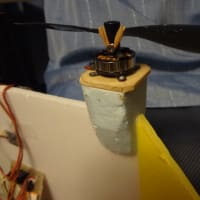
- モーターのローター長は長い方が良い
22×05、22×14、38×26のモーターでテストしましたが 、22×05は脱極する場合が多く使い物になりませんでした。 - ペラサイズはワンランク小さく軽いものが良い。
瞬時に逆回転するには、慣性力を出来るだけ小さくする必要がある。 - ESCは逆転できるだけでなく、専用にチューニングできるものが必要。
使用したアンプは進角やブレーキの設定はありましたが、駆動周波数の設定はありませんでした。周波数が変えられると結果が違ってくるかもしれません。
今回使用したコントローラソフトは「MulticopterQuadX」を修正してMbedライブラリにアップしてあります。
電源投入直後の初期画面からエルロンスティック右で機体選択画面になるので「QuadX-3D」を選択します。
フライトモードはジャイロ感度信号が1.5ms以上の時ノーマルモードとなりスロットルの中央以上でモーターが回転し、1.5ms以下の時スタントモードとなりスロットルの中央で回転方向が切り替わります。
もっと多くのアンプを試してみたいのですが財力が無いのでチャレンジできません。チャレンジしてよい結果が得られた方がいれば、お知らせいただくとありがたいです。(NINJA400を買ったほうが安く付くんじゃないかとも思いますが・・・・ま、達成感だけですね)