この記事ではフィードバック型動的量子化器,ΔΣ変調器(デルタシグマ変調器)についてまとめます。動的量子化器について説明した動画や関連記事リンクは最下部に置いています。また、これまでの動的量子化器に関する研究を参考文献としてまとめていますので是非ご覧ください。
動的量子化器について
デルタシグマ変調器が提案されたのは50年以上前です。
H. Inose, Y. Yasuda and J. Murakami, IRE Trans Space Electron. Telemetry, Vol. 8, pp. 204-209 (1962)
研究の変遷については、ΔΣ型アナログ/デジタル変換器入門に詳しく書かれています。オーバーサンプリング型ADC/DACとも呼ばれます。また、制御工学では動的量子化器として、京大の東教授らにより研究が進められて最適動的量子化器について研究されています。本記事は、動的量子化の概要について述べたものであり、以下の2記事の簡易版に位置付けられます。
>>信号品質を保つディジタル化技術: ノイズシェーピング量子化—IV —制御のための動的量子化器(2)(jst.go.jp)
>>信号品質を保つディジタル化技術: ノイズシェーピング量子化―II ∆Σ変調器(jst.go.jp)
ビットレートと量子化
ここではまず、ビットレートと量子化について考えます。毎サンプリングごとにビット正しく送信できる通信路を扱うものとします。ここで、
の場合、「0」もしくは「1」の2通りの状態を表現することができます。また、
の場合には,「00」,「01」,「10」,「11」の4通りの状態を表現することができます。ここで,
において「00」のときを-1.5,「01」を-0.5,「10」を+0.5,「11」を+1.5と通信路の入力側と出力側で共通認識した上で、この値を信号として制御するとき、通信路を介した制御システムは量子化幅
の離散値入力システムとみなすことができます。
静的量子化と量子化誤差
まず、動的量子化器について説明する前段階として、静的量子化について述べたいと思います。

図は、静的一様量子化器であり、はレベル数
の静的一様量子化器であり飽和を含むものである.図は
の場合の
の例を示しています。
の量子化幅を
とし、その中心値を
としています。信号の定義域が
の信号
に対して,
の量子化ノイズは
以内となる一方、入力
が定義域を超えると量子化ノイズが
よりも大きくなります。
動的量子化器の基本構造
動的量子化器は、上述の静的量子化器を利用した形で次のように記述されます。
ここで、の値により動特性が変わります。また、飽和の定義域を満たすか否かも信号レンジだけでなく
に依存します。
以下は、量子化器の入出力例です。図は1ビット(2値)の量子化を行う場合を示しており、が出力、
がそれぞれ入力です。
としてサイン波を与えています。単なる四捨五入では
は矩形波になりますが、動的量子化ではそうはならず、0.5と-0.5を小刻みに切り替える出力が得られていることがわかります。

性能評価について
動的量子化器の性能評価について述べたいと思います。まず、以下の評価用のシステムを考えます。
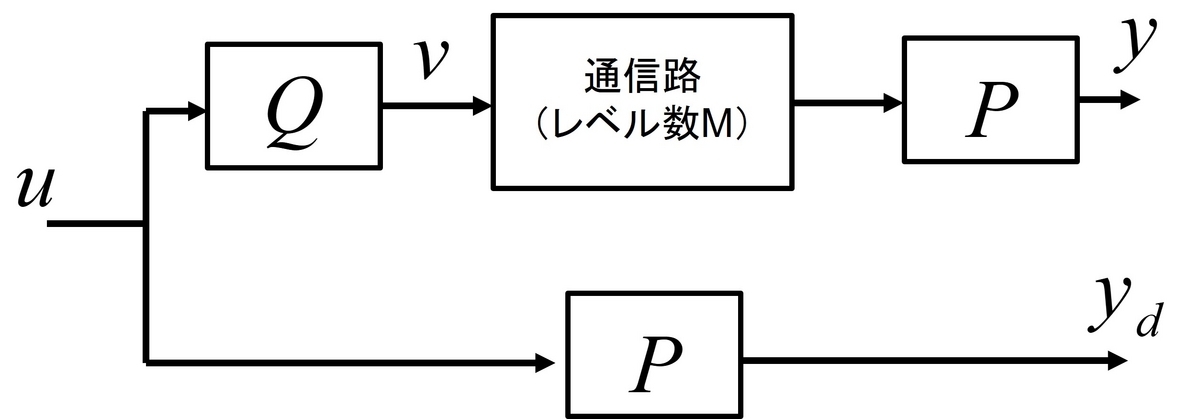
このシステムの理想出力がであり、量子化器
を通過した信号を対象
に印加した出力を
とします。このとき、
と
との差が小さいほど、量子化器
としての性能は高いと言えます。
この両者の差を小さくする量子化器パラメータの設計について様々な研究がされています。
量子化レベル数に基づいた設計については以下の文献をご覧ください。
>>信号品質を保つディジタル化技術: ノイズシェーピング量子化—IV —制御のための動的量子化器(2)(jst.go.jp)
フィルタと量子化器の関係について
動的量子化器設計において、対象が制御対象の場合と、設計者が任意に設定できるフィルタの場合がありえます。フィルタを併せた性能を高くしていく必要がある場合は動的量子化器(ΔΣ変調)だけでなく、ポストフィルタ設計が有用になります。
さらに以下の文献ではプレフィルタを含む構成と性能改善について述べています。
>>信号品質を保つディジタル化技術: ノイズシェーピング量子化―II ∆Σ変調器(jst.go.jp)
動的量子化器の動画・関連記事
以下は動的量子化器について説明している動画になります。
関連記事はこちらです。
参考文献(学術論文)
- H. Okajima, Y. Minami and N. Matsunaga:A Control Structure for Unilateral System with Communication Rate Constraint, SICE Journal of Control, Measurement, and System Integration, Vol. 11, No. 6, pp. 510-516(2018) (T&F, Open Access)
- H. Okajima, K. Sawada and N. Matsunaga: Dynamic Quantizer Design Under Communication Rate Constraints, IEEE Transactions on Automatic Control, Vol.61, No.10, pp.3190-3196 (2016)
- G. Koutaki, H. Okajima, N. Matsunaga and K. Uchimura: Color quantization and optimization of luminance for digital mirror device–based projector, IEEE transactions on Consumer Electronics, Vol.62, No.2, pp.103-110 (2016)
- [8] H. Okajima, M. Honda, R. Yoshino and N. Matsunaga: A Design Method of Delta-Sigma Data Conversion System with Pre-Filter, SICE Journal of Control, Measurement, and System Integration Vol.8, No.2, pp.154-160 (2015) (T&F, Open Access)
- 岡島寛,細江陽平,萩原朋道:許容平均ビットレート制約を満足する周期時変動的量子化器の構成,計測自動制御学会論文集,Vol. 54, No. 11, pp. 827-835(2018)
- 岡島寛,南裕樹,松永信智:ネットワーク化制御系に対する設計自由度の高い制御構造の提案,計測自動制御学会論文集 Vol.52, No.7, pp.393-400 (2015)
- 岡島寛,上瀧剛,松永信智,内村圭一:DLPプロジェクタに対する光量と画質制御のためのPWM幅設計,計測自動制御学会論文集,Vol.51, No.9, pp.645-654 (2015)
- 鍋倉司樹,岡島寛,松永信智:プレフィルタとポストフィルタを含むAD/DA変換系の設計と音声信号圧縮系への適用,計測自動制御学会論文集,Vol.50, No.3, pp.295-302 (2014)
- 岡島寛,澤田賢治,海部静,松永信智:通信容量制約を満足する動的量子化器の出力可到達領域に基づいた性能改善,計測自動制御学会論文集,Vol.48,No.6, pp.359-361 (2012)
- 岡島寛,澤田賢治,松永信智,南裕樹:通信容量制約に基づくMIMO系に対する動的量子化器設計,電気学会論文誌C編,Vol.131,No.10, pp.1767-1774 (2011)
- 岡島寛,松永信智:AD/DA変換におけるプレフィルタとポストフィルタの二段階設計,計測自動制御学会論文集,Vol.47,No.4, pp.217-219 (2011)
- 岡島寛,澤田賢治,松永信智:通信容量制約に基づく動的量子化器の統合設計,計測自動制御学会論文集,Vol.47,No.2, pp.126-133 (2011)
- 佐々野浩二,岡島寛,松永信智:非整数次PID制御系のメモリ制約下での実装手法の検討と熱板温度制御系による実機検証,システム制御情報学会論文誌,Vol.23,No.11,pp.257-264 (2010)
- 岡島寛,松永信智,澤田賢治:通信容量制約に基づく動的量子化器の量子化幅設計と性能解析,計測自動制御学会論文集,Vol.46,No.6,pp.327-335 (2010)
- 岡島寛,松永信智,川路茂保:設計自由度を陽に含む動的量子化器,計測自動制御学会論文集,Vol.44,No.5,pp.458-460 (2008)
参考文献(解説記事)
- 岡島: 信号品質を保つディジタル化技術: ノイズシェーピング量子化—IV —制御のための動的量子化器(2) ,システム/制御/情報,Vol.61,No.8,pp.347-352 (2017)
- 岡島,南:信号品質を保つディジタル化技術: ノイズシェーピング量子化―II ∆Σ変調器,システム/制御/情報,Vol.61,No.4,pp.158-163 (2017)
参考文献(国際会議)
- Hiroshi Okajima, Yohei Hosoe, Tomomichi Hagiwara and Yuki Minami, Basic Idea of Periodically Time-Varying Dynamic Quantizer in Networked Control Systems, Proceedings of the SICE Annual Conference 2019, pp.883-889 (2019)Finalist of the poster presentation award
- Yuki Saigo, Hiroshi Okajima, Nobutomo Matsunaga, Design of networked control for multiple inputs and outputs feedback control system, Proceedings of the SICE Annual Conference 2018, pp.1423-1428 (2018)
- K. Inomoto, H. Okajima, G. Koutaki, N. Matsunaga and K. Uchimura:Method for designing a quantized image for digital micromirror device-based projectors using a weighted evaluation function, Proceedings of the SICE Annual Conference 2017Finalist of the young author award
- H. Okajima, Y. Minami and N. Matsunaga:Unilateral Control Structure Under Communication Rate Constraint, Proceedings of NecSys 2016 (6pages) (2016)
- G. Koutaki, H.Okajima, N. Matsunaga and K.Uchimura:Optimization of color quantization with total luminance for DLP projector and its evaluation system, ICIP2015
- H. Okajima, M. Honda, R. Yoshino and N. Matsunaga:A design method of delta-sigma data conversion system with pre-filter, SICE Annual Conference 2014, pp.1388-1394, (2014.9)
- R. Yoshino, H. Okajima, N. Matsunaga and Y. Minami:Dynamic quantizers design under data rate constraints by using PSO method, SICE Annual Conference 2014, pp.1041-1046, (2014.9)
- K. Nabekura, H. Okajima, N. Matunaga and N. Nakamura:On Collision-Avoidance Steering Assistance of Piggyback Type Electric Wheelchair with Inference of Driver’s Intention, ICT-PAMM Workshop on Mobility Assistance and Service Robotics, p20-25, 2013.11.
- K. Sawada, H. Okajima, N. Matsunaga and Y. Minami:Dynamic quantizer design for MIMO systems based on communication rate constraint, IECON 2011, 2011.11.
- H. Okajima, K. Sawada and N. Matsunaga:Integrated Design of Filter and Interval in Dynamic Quantizer under Communication Rate Constraint, The 18th IFAC World Congress, 2011.8.
自己紹介
岡島 寛 (熊本大学工学部情報電気工学科准教授)
制御工学の研究をしています。モデル誤差抑制補償器,状態推定,量子化制御など
研究室HP
岡島寛 (システム制御 control-theory.com)
English Web Page
Hiroshi Okajima (Control Engineering control-theory.com)
制御動画ポータルサイト
制御工学チャンネル(伝達関数・状態方程式・MATLABなど)
電気動画ポータルサイト
本記事をお読みいただきありがとうございます。役に立った、と思われましたら、ブックマーク・シェア等のアクションをしていただければ嬉しいです。
本記事は以上です。